



Dwigatel enjamlarynyň giňişligini öwrenmek, hersiniň aýratyn aýratynlyklary bolan LS1 we LS6 hereketlendirijilerini açýar. Iň ýokary öndürijilik ölçegleri bilen tanalýan LS6 öwünýärhas ýokary akym derejesihowa kabul ediş ulgamynda, RPM mümkinçiliklerini ýokarlandyrmak üçin has berk klapan çeşmeleri we güýçlendirilen göterijiligi we dowamlylygy bolan kamera. Başga bir tarapdan, LS1 görnükli aýratynlyklary bolan öňküsi ýaly dur, ýöne LS6-yň ösüşleri bilen deňeşdirilende gysga bolýar. Bu hereketlendirijilere düşünmek, kämilleşdirmegiň üýtgeýän täsirine öwrenmek üçin esas döredýärLS6 kabul ediş mukdaryLS1 hereketlendirijisinde. Mundan başga-da, aPerokary öndürijilikli kabul ediş Manifoldmotoryň mümkinçiliklerini hasam ýokarlandyryp, höwesjeňlere güýç we netijeliligi ep-esli ýokarlandyryp biler.
LS1 we LS6 hereketlendirijilerine düşünmek
LS1 hereketlendirijisine syn
LS1 hereketlendirijisine göz aýlanyňyzda, onuň esasy aýratynlyklaryna we aýratynlyklaryna baha berip bolýar. LS1 ygtybarly öndürijilik mümkinçiliklerini üpjün edip, 5.7L süýşmesine eýe. Alýumin blok we silindr kelleleri umumy netijeliligi ýokarlandyrýan ýeňil dizaýna goşant goşýar. Mundan başga-da, LS1 hereketlendirijisi yzygiderli ýangyç sepmek bilen enjamlaşdyrylyp, ýangyjyň gowulaşmagy üçin ýangyjyň iberilmegini optimallaşdyrýar.
Esasy aýratynlyklar we aýratynlyklar
- Çalyşmak: LS1 hereketlendirijisinde ýeterlik kuwwat çykaryşyny üpjün edip, 5.7L süýşmesi bar.
- Material kompozisiýa: Alýumin blok we silindr kellelerinden peýdalanyp, LS1 güýç bilen agramyň peselmeginiň arasynda deňagramlylygy gazanýar.
- Uelangyç sanjym ulgamy: Fuelangyç sanjym tehnologiýasy bilen LS1 öndürijiligi ýokarlandyrmak üçin takyk ýangyç iberilmegini üpjün edýär.
Umumy öndürijilik meseleleri
Täsirli dizaýnyna garamazdan, LS1 hereketlendirijisi umumy öndürijilik meselesinden mahrum däl. Wagtyň geçmegi bilen höwesjeňler nädogry kabul edilen köp sanly gazetlerden sowadyjy syzmak ýaly kynçylyklara duçar bolup bilerler. Mundan başga-da, porşen halkasynyň könelmegi sebäpli ýag sarp edilmegi motoryň saglygyna täsir edip biler.
LS6 hereketlendirijisine syn
LS6 hereketlendirijisine geçmek, öňküsinden has öňe gidişlik älemini açýar. LS6 öndürijilik ölçeglerini täze belentliklere çykarýan görnükli gowulaşmalar bilen tapawutlanýar. Güýçlendirilen howa akymynyň dinamikasyndan başlap, güýçlendirilen içerki böleklere çenli LS6, awtoulag landşaftynda aýratynlaşdyrýan inçe in engineeringenerçilik çemeleşmesini öz içine alýar.
Esasy aýratynlyklar we aýratynlyklar
- Howa akymynyň ösüşi: LS6 hereketlendirijisi howa kabul ediş ulgamyny birleşdirýärhas ýokary akym derejesiLS1 bilen deňeşdirilende, ýokary ýanma netijeliligini ýokarlandyrýar.
- Klapan çeşmeleri: Has ýokary RPM-lerde işlemäge ukyply has berk klapan çeşmeleri bilen enjamlaşdyrylan LS6, talap edilýän şertlerde güýçlendirilen çydamlylygy görkezýär.
- Kamşaft dizaýny: Bilen kamerany görkezmekýokarlanmagy we dowamlylygy, LS6 gowulaşdyrmak üçin klapan wagtyny optimallaşdyrýar.
LS1 hereketlendirijisinden gowulaşmalar
LS1-den LS6-a ewolýusiýa öndürijilik ukybynda ep-esli böküşi alamatlandyrýar. 6eri gelende aýtsak, LS6 silindrli kellelerdäki has kiçi ýangyç kameralary güýçlenýän güýç çykarylyşy üçin gysyş derejesini ýokarlandyrýar. Mundan başga-da, howa akymyny dolandyrmakda we valtrain komponentlerinde gazanylan üstünlikler hereketlendirijiniň ösüşinde serhetleri öňe sürmek borjuny görkezýär.
Almagyň köpugurly roly
Almagyň köpugurlylygy
Thekabul etmek köp gezekhereketlendirijiniň işleýşini optimizirlemekde möhüm rol oýnaýar. Howa-ýangyç garyndysyny her silindre netijeli paýlamak bilen, deňagramly we yzygiderli ýanma prosesini üpjün edýär. Bu aýgytly komponent, kabul ediş howasynyň hereketlendiriji silindrlerine ýetmeginiň ýoly bolup hyzmat edýär, bu ýerde güýç öndürmek üçin ýangyç bolýar.
Motoryň işleýşine nähili täsir edýär
Thekabul etmek köp gezekhowa akymyny sazlamak arkaly hereketlendirijiniň netijeliligine we kuwwatyna gönüden-göni täsir edýär. Gowy dizaýn edilenkabul etmek köp gezekýanmagyň netijeliligini ýokarlandyrmaga we at güýjüni ýokarlandyrmaga mümkinçilik berýän howa akymynyň dinamikasyny ýokarlandyrýar. Munuň tersinekabul etmek köp gezekhowa akymyny çäklendirip biler, öndürijiligiň peselmegine we potensial ýitgä sebäp bolup biler.
LS1 bilen LS6 kabul ediş manifoldlarynyň arasyndaky tapawutlar
DeňeşdirilendeLS1weLS6 kabul ediş manifoldlarygörnükli tapawutlar aýdyň bolýar. TheLS6 kabul ediş mukdaryöňküsinden ýokarydyrhas ýokary akym derejesi, berk ýapgy çeşmelerigüýçlendirilen RPM mümkinçilikleri we optimal göteriş we dowamlylyk üçin niýetlenen kamera. Bu goşmaça enjamlar hereketlendirijiniň ýokary öndürijiligine we umumy netijeliligine terjime edilýär.
LS6 kabul ediş manifoldynyň peýdalary
GujaklamakLS6 kabul ediş mukdarysürüjilik tejribäňizi täze belentliklere çykarýan artykmaçlyklar giňişligini açýar.
Howa akymynyň artmagy
TheLS6 kabul ediş mukdaryLS1 kärdeşi bilen deňeşdirilende howa akymyny ep-esli ýokarlandyrmak ukyby bilen tapawutlanýar. Bu güýçlendirilen howa akymy, hereketlendirijiniň silindrleriniň içinde has gowy ýanmaga kömek edýär, netijede kuwwatyň gowşurylyşy we umumy öndürijiligi ýokarlanýar.
Dwigateliň netijeliligi
Birleşdirmek arkalyLS6 kabul ediş mukdary, diňe bir at güýjüni ýokarlandyrmak bilen çäklenmän, hereketlendirijiniň netijeliligini ýokarlandyrýarsyňyz. LS6 manifoldynyň optimallaşdyrylan dizaýny, howanyň silindrlere has täsirli ýetmegini üpjün edýär, ýangyjyň ýanmagyny ýokarlandyrýar we energiýa sarp edilişini azaldýar.
Gurnama prosesi
Taýýarlyk
Gurallar we materiallar
- Soket toplumy: Gurmak işinde dürli boltlary we hozlary ýerleşdirmek üçin dürli ululykdaky rozetka barlygyna göz ýetiriň.
- Tork wrenç: Tork wyşkasy öndürijiniň aýratynlyklaryna berkidilmegi, dogry ýygnalmagyny üpjün etmek üçin zerurdyr.
- Gasket möhürleýji: Elinde gazyk möhürleýji bolmagy, howa syzmagynyň öňüni alyp, komponentleriň arasynda ygtybarly möhür döretmäge kömek eder.
- Raglar we arassalaýjy ergin: Surüzleri süpürmek we arassa iş gurşawyny üpjün etmek üçin eşikleri we arassalaýjy ergini ýakyn ýerde saklaň.
- Howpsuzlyk äýnegi we ellik: Islendik galyndylardan ýa-da himiki maddalardan goramak üçin äýnek we ellik geýip howpsuzlygy ileri tutuň.
Howpsuzlyk çäreleri
- Gurnama başlamazdan ozal, elektrik togunyň näsazlygynyň öňüni almak üçin batareýany aýryň.
- Erginleri ýa-da möhürleýjileri arassalamakdan tüsse çykarmazlyk üçin gowy şemalladylýan ýerde işläň.
- Injuriesaralanmalaryň öňüni almak üçin gurallary ulananyňyzda seresap boluň, elmydama dogry tutmagy we gözegçilikde saklaň.
Stepdimme-ädim gurmak boýunça gollanma
LS1 kabul ediş manifoldyny aýyrmak
- Batareýany aýryň: Elektrik birikmesini ýok etmek üçin batareýanyň negatiw terminalyny aýyrmak bilen başlaň.
- Motoryň gapagyny aýryň: Almagyň manifoldyna aňsatlyk bilen girmek üçin motoryň gapagyny üns bilen çykaryň.
- Açylmadyk birikmeler: Soket toplumyňyzy ulanyp, LS1 kabul ediş manifoldyny üpjün edýän ähli birikmeleri açyň.
- Wakuum şlanglary bölüň: Aýyrmazdan ozal kabul ediş manifoldyna birikdirilen islendik vakuum şlanglaryny aýryň.
LS6 kabul ediş manifoldyny gurmak
- Arassa ýüzler: Iň amatly öndürijilik üçin täze LS6 kabul ediş manifoldyny gurmazdan ozal, ähli ýüzleriň arassa we galyndysyzdygyna göz ýetiriň.
- Gasket möhürini ulanyň: LS6 kabul ediş manifoldy bilen hereketlendiriji blokynyň arasynda ygtybarly möhür döretmek üçin jübüt ýüzüne gazyk möhürini çalyň.
- Positionerleşýän ýer LS6 Manifold: LS6 kabul ediş manifoldyny dykyzlyklar bilen dogry deňleşdirip, hereketlendirijiniň blokyna seresaplyk bilen ýerleşdiriň.
- Boltlary kem-kemden çekdiriň: Tork wilkasyny ulanyp, basyşy deň paýlamak üçin boltlary kem-kemden nagyş görnüşinde gysyň.
Gurmakdan soňky barlaglar
- Baglanyşyklary barlaň: Hemme zadyň ygtybarly berkidilendigine göz ýetirmek üçin gurnamadan soňky ähli birikmeleri we şlanglary iki gezek barlaň.
- Batareýany täzeden birikdiriň: Gurmak gutaransoň, batareýany täzeden birikdiriň we işe başlamak üçin durnukly elektrik birikmesini üpjün ediň.
- Başlangyç dwigateli: Motoryňyzy işe giriziň we LS6 kabul ediş manifoldynyň nädogry gurlandygyny görkezip biljek üýtgeşik sesleri diňläň.
Öndürijilik gazanjy we synag
Garaşylýan öndürijilik gowulaşmalary
At güýji we tork gazanjy
- Kuwwatyň çykarylyşynyň ýokarlanmagy: LS6 kabul ediş manifoldynyň täzelenmegi ep-esli ýokarlanmagyna sebäp bolup bilerat güýjiwetork, hereketlendirijiniň umumy öndürijiligini ýokarlandyrmak.
- Optimal ýanmak: LS6 kabul ediş manifoldynyň dizaýny, täsirli howa akymyny ösdürýär, netijede güýçlendirilen ýangyç prosesleri gowulaşýarat güýjigazançlary.
- Giňeldilen tork gowşurylyşy: LS6 kabul ediş manifoldy bilen, has dinamiki sürüjilik tejribesini üpjün edip, dürli RPM diapazonlarynda tork gowşurylyşynyň ýokarlanmagyna garaşyň.
Hakyky dünýäde sürüjilik peýdalary
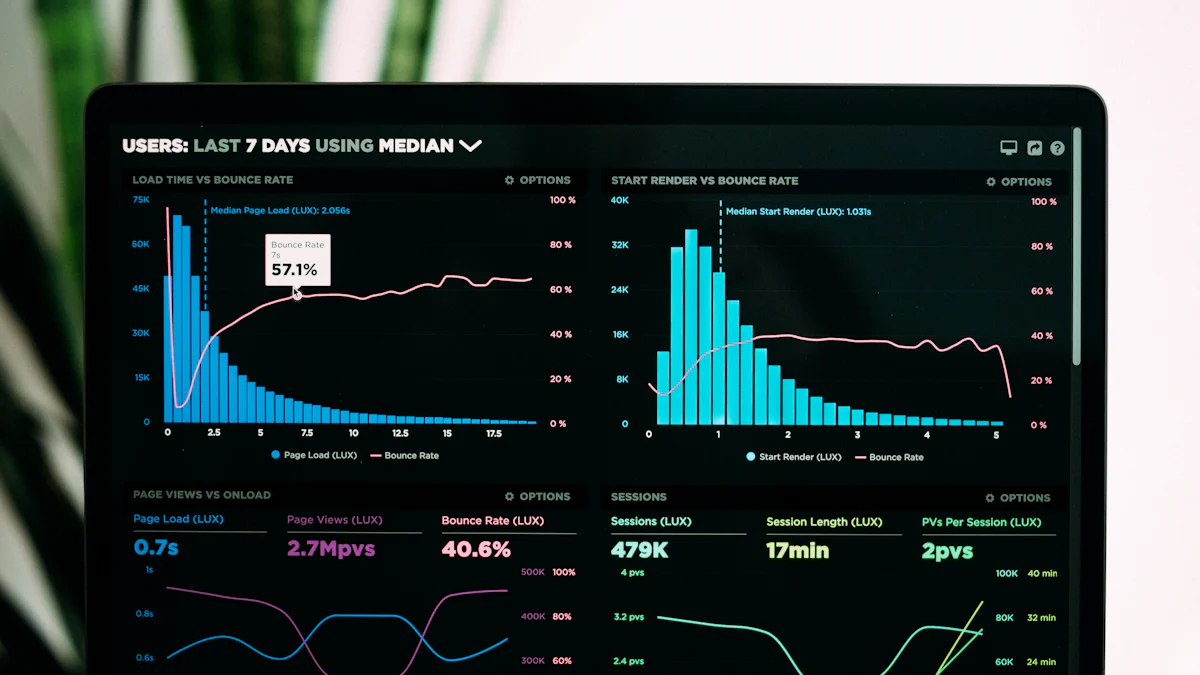
Dyno synagy
Dorman, utanjaň işleýän LS1 / LS6 kabul ediş manifoldyny çalyşýarasyl LS6 güýç belgileri.
- Öndürijilik barlagy: LS6 kabul ediş manifoldyny gurnamak arkaly gazanylan hakyky girdejileri barlamak üçin dyno synagyndan peýdalanyň.
- Maglumatlaryň derňewi: Dyno synagy, at güýjüni we torky gowulandyrmak barada anyk maglumatlary berýär, hakyky dünýädäki öndürijilik gowulandyrmalary barada düşünje berýär.
- Deňeşdiriş derňewi: Awtoulagyňyzyň başdan geçirýän görnükli peýdalaryny kesgitlemek üçin LS6 kabul ediş manifoldyny gurmazdan ozal we soň dyno netijelerini deňeşdiriň.
Iň amatly öndürijilik üçin inçe düzmek
Bazardan soňky sarp edişhas uly çişiriji jisimleröndürijiligini gowulandyrmak üçin.
- Takyk sazlamak: Gurluşdan soňky motoryňyzy gowy düzmek, sürüjilik islegleriňize laýyk optimal öndürijilik derejesini üpjün edýär.
- Throttle jogap güýçlendirmek: Sazlaýyş parametrlerini sazlamak, LS6 kabul ediş manifoldy bilen kämilleşdirilen LS1 hereketlendirijiňiziň mümkinçiligini artdyryp, çişirilen jogaby arassalaýar.
- Özbaşdaklaşdyrma opsiýalary: Awtoulagyňyzyň başlangyç gurnama tapgyryndan has ýokary mümkinçiliklerini has-da ýokarlandyrmak üçin yzygiderli sazlaýyş çözgütlerini öwreniň.
An-a täzelemegiň artykmaçlyklary hakda oýlanmakLS6 kabul ediş mukdary, hereketlendirijiniň işleýşinde ep-esli ösüşe garaşyp bolar. LS1 eýelerine ulaglary üçin güýç we netijelilik giňişligini açyp, bu üýtgetmäni öwrenmäge çagyrylýar. Gurmak arkaly LS1 hereketlendirijiniň potensialyny ulaltmak arkalyLS6 kabul ediş mukdary, höwesjeňler at güýjüni we torky ep-esli ýokarlandyryp, sürüjilik tejribesini täze belentliklere çykaryp bilerler.
Iş wagty: Iýun-26-2024